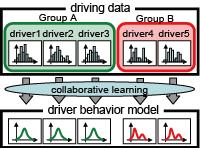
近年は自動車運転支援技術においても,支援の内容や強度を個人に合わせて設計する個別適合型支援が注目されています.この支援の実現のためには,ドライバごとの運転行動モデリングが不可欠となります.従来の研究では,支援対象者の運転データのみから学習することで,このモデリングを行っていましたが,学習データが大量に必要となってしまう問題がありました.そこで私たちは,支援対象者のデータだけでなく,運転傾向の似たパターンをもつドライバのデータも学習に用いることで,一人あたりの学習データが少数でも,ドライバ個人のモデリングを可能にする研究をしています.