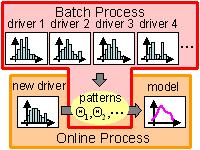
自動車に搭載したセンサデータからドライバ個人の運転パターン(急ぎ,マイペースなど)をモデリングする研究をしています.パターンを把握することで,例えば運転操作の判断が遅いときには早めに警報を鳴らすといった,人や状況に合わせた安全運転支援システムの設計が可能となります.しかし運転パターンは同一人物でも日によって異なるため,この支援の実現には,その日の運転傾向をいち早く把握することが不可欠です.本研究では多人数の運転データから,複数のパターンを抽出し,いまの傾向と似たパターンの情報を利用することで,そのときの傾向を高速かつ高精度に推定します.またデータの規模に依らない柔軟な推定を可能とするため,パターン数の推定も含めた汎用な統計推論手法にも取り組んでいます.