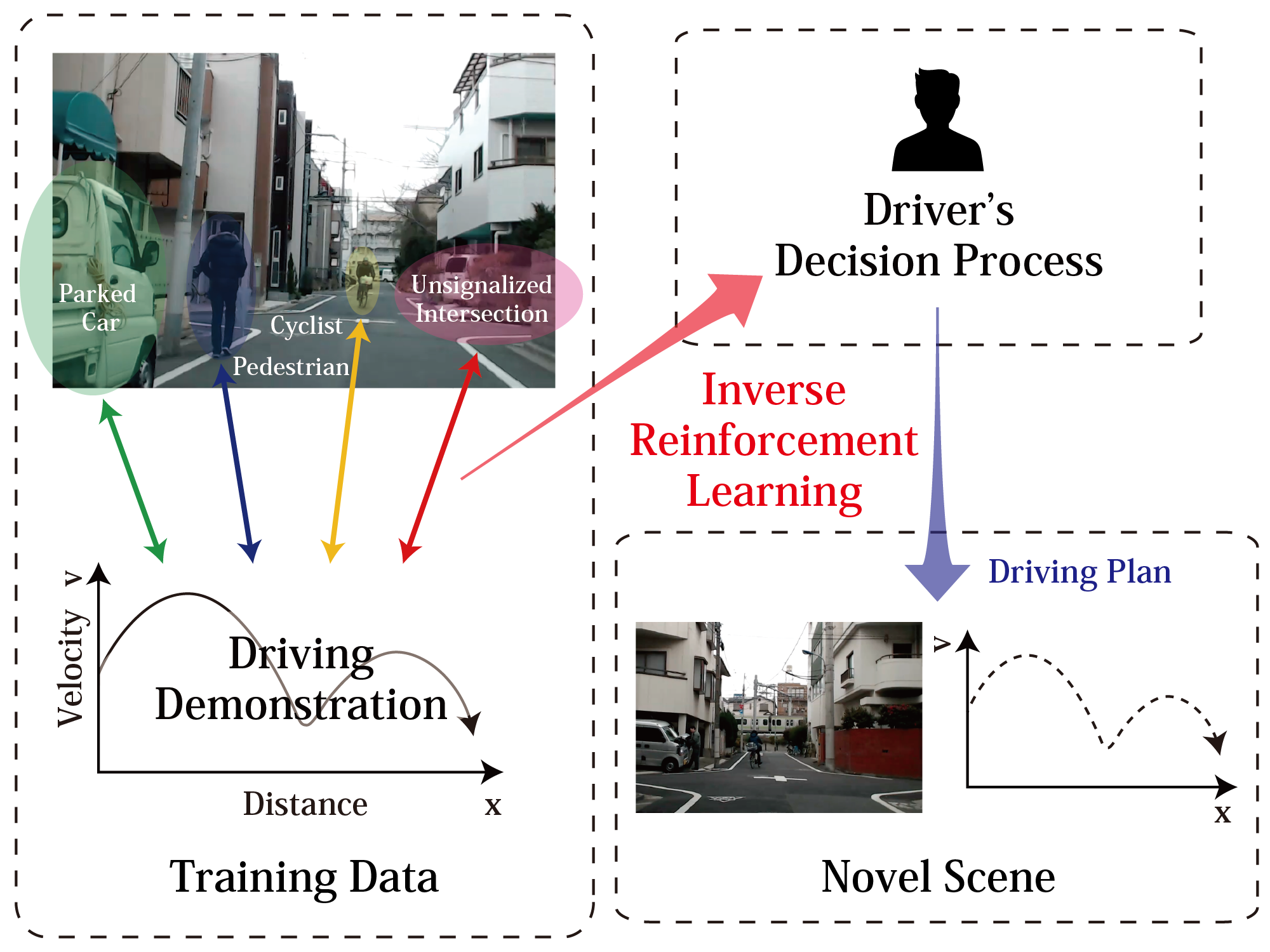
 近年,予防安全技術の研究が活発であり,交通事故の低減に貢献していますが,生活道路では事故の減少率が低いのが現状です.生活道路では歩行者の飛び出しやドライバーの安全不確認による事故が多いのが特徴であり,従来の人検知後の衝突回避だけでは,自動車が制動距離を要するため不十分な場合があります.この問題に対処するためには,潜在的な危険を予知した事前の運転計画,つまり危険予知運転が必要であり,本研究ではこの運転行動のモデル化に取り組みました.生活道路の危険予知運転のモデル化の難しさとしては,交通ルールの遵守だけでは不十分で安全に対する明確な基準がないことと,歩車が混在するため環境が多様であることが挙げられます.本研究では,逆強化学習を用いてドライバーの運転行動に基づきモデルを最適化することで,この問題に対処しました(Shimosaka et al., ITSC 2014).応用例として,規範ドライバーの運転行動データに基づき危険予知運転の規範モデルを構築し,それを用いて危険予知が不十分なドライバーに警告を与えるシステムについて検討しました.
近年,予防安全技術の研究が活発であり,交通事故の低減に貢献していますが,生活道路では事故の減少率が低いのが現状です.生活道路では歩行者の飛び出しやドライバーの安全不確認による事故が多いのが特徴であり,従来の人検知後の衝突回避だけでは,自動車が制動距離を要するため不十分な場合があります.この問題に対処するためには,潜在的な危険を予知した事前の運転計画,つまり危険予知運転が必要であり,本研究ではこの運転行動のモデル化に取り組みました.生活道路の危険予知運転のモデル化の難しさとしては,交通ルールの遵守だけでは不十分で安全に対する明確な基準がないことと,歩車が混在するため環境が多様であることが挙げられます.本研究では,逆強化学習を用いてドライバーの運転行動に基づきモデルを最適化することで,この問題に対処しました(Shimosaka et al., ITSC 2014).応用例として,規範ドライバーの運転行動データに基づき危険予知運転の規範モデルを構築し,それを用いて危険予知が不十分なドライバーに警告を与えるシステムについて検討しました.
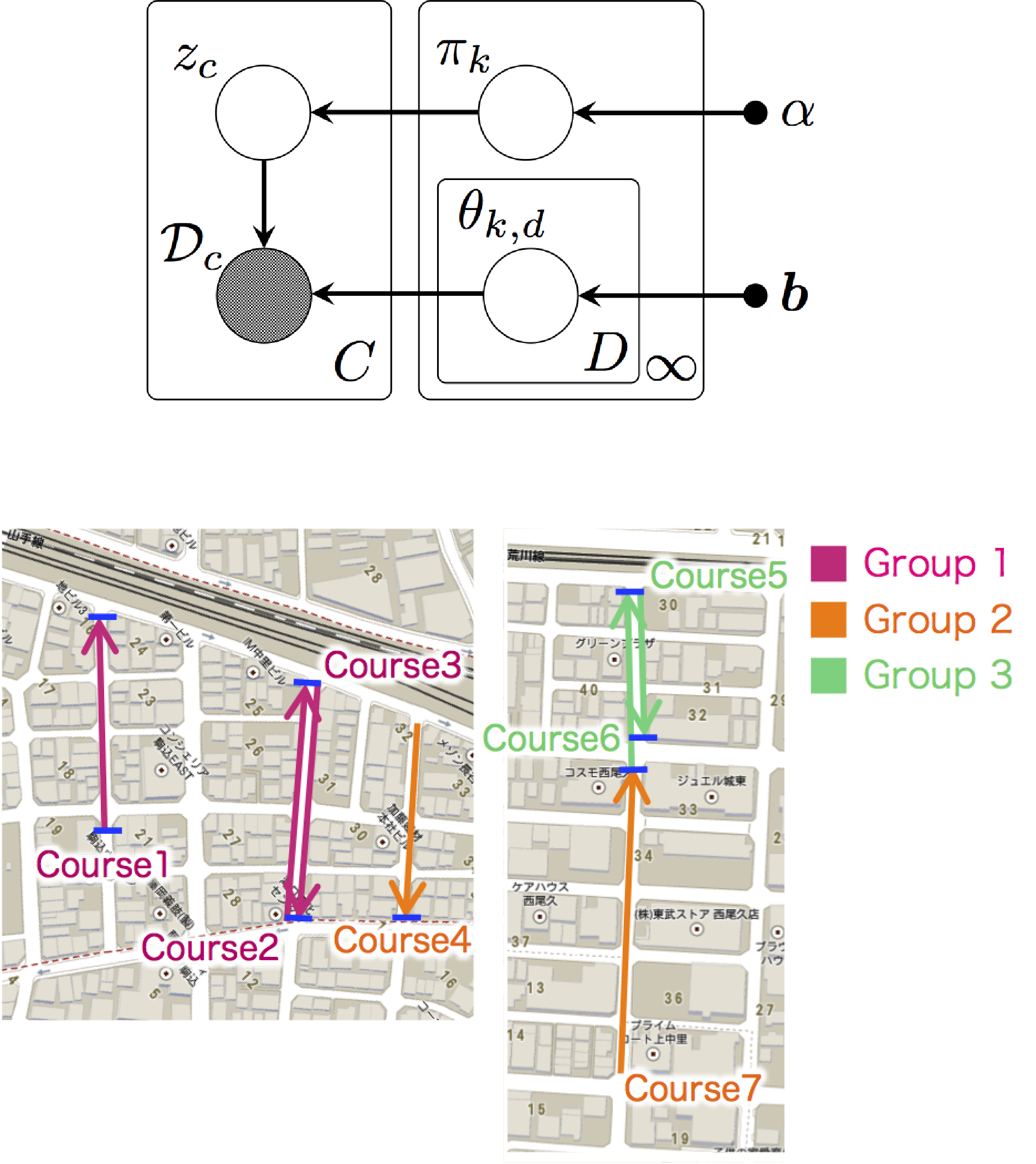 さらに,安全運転一つといっても,見通しの良い/悪い道路によって運転の戦略は変わります.私たちは,ディリクレ混合過程に基づいた逆強化学習によって複数の報酬関数を学習することにより,このような環境の多様性の問題に対処しました(Shimosaka et al., IV 2015).本手法では,何個のモデルにどのように分けるかを自動で学習することが可能です.また,熟練ドライバの運転行動に基づいて環境をクラスタリングすることは,環境ごとの潜在的な危険度特性によって分類することになり,クラスタリング結果が走行環境の評価にも役立つ可能性を示しました.
さらに,安全運転一つといっても,見通しの良い/悪い道路によって運転の戦略は変わります.私たちは,ディリクレ混合過程に基づいた逆強化学習によって複数の報酬関数を学習することにより,このような環境の多様性の問題に対処しました(Shimosaka et al., IV 2015).本手法では,何個のモデルにどのように分けるかを自動で学習することが可能です.また,熟練ドライバの運転行動に基づいて環境をクラスタリングすることは,環境ごとの潜在的な危険度特性によって分類することになり,クラスタリング結果が走行環境の評価にも役立つ可能性を示しました.
関連論文
西賢太郎, 下坂正倫, 金子卓弘, 稲垣徳也, 福倉寿信, 岩井明史.
逆強化学習を用いた生活道路における危険予知運転のモデル化.
自動車技術会 2014 年春季大会 学術講演会前刷集 No.6-14, pp. 9–12, 2014.
Masamichi Shimosaka, Takuhiro Kaneko, Kentaro Nishi.
Modeling risk anticipation and defensive driving on residential roads with inverse reinforcement learning.
In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC2014), pp.1694-1700, 2014.
Masamichi Shimosaka, Kentaro Nishi, Junichi Sato, Hirokatsu Kataoka.
Predicting driving behavior using inverse reinforcement learning with multiple reward functions towards environmental diversity.
In Proceedings of 2015 IEEE Intelligent Vehicles Symposium (IV 2015), pp. 567–572, 2015.