 The declining trend in the number of fatal accidents on residential roads in Japan has been flat for the last two decades. Against this background, the development of Advanced Driver Assistance Systems (ADAS) to protect the safety of pedestrians on residential roads is gathering attention. In particular, since it is known that there is a strong correlation between the pedestrian mortality rate and the vehicle speed, it is necessary to model a risk anticipation and defensive driving of skilled drivers on residential roads in order to develop a sophisticated ADAS.
The declining trend in the number of fatal accidents on residential roads in Japan has been flat for the last two decades. Against this background, the development of Advanced Driver Assistance Systems (ADAS) to protect the safety of pedestrians on residential roads is gathering attention. In particular, since it is known that there is a strong correlation between the pedestrian mortality rate and the vehicle speed, it is necessary to model a risk anticipation and defensive driving of skilled drivers on residential roads in order to develop a sophisticated ADAS.
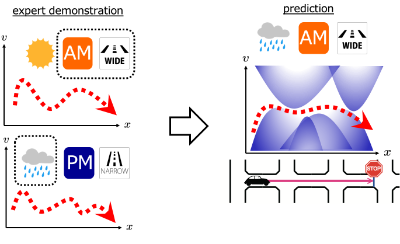
In driving behavior modeling on a residential road, it is important to consider the effect of context such as weather, time zone, and road width on a risk anticipation and defensive driving of skilled drivers. Therefore, in this research, we are developing a model that can accurately predict driving behavior even in case of unknown driving driving situations that do not exist in the training data.
In this framework, the driving context is encoded and formulated as a model that takes into account the interaction with the reward function based on the geometry of the road.This makes it possible to adjust the reward field according to multiple situations, which leads to a significant improvement in the prediction performance of driving behavior.We conducted an experiment with an expert driver, collecting data over 100 km for various contexts and roads.The experimental results show that the prediction of the proposed method is most similar to the driving data of a skilled driver even for contexts with a small number of data or unknown contexts.
[_/vc_column_text]Publications
Kentaro Nishi, Masamichi Shimosaka
Fine-Grained Driving Behavior Prediction via Context-Aware Multi-Task Inverse Reinforcement Learning
In proceedings of the 2020 IEEE International Conference on Robotics and Automation, 2020.