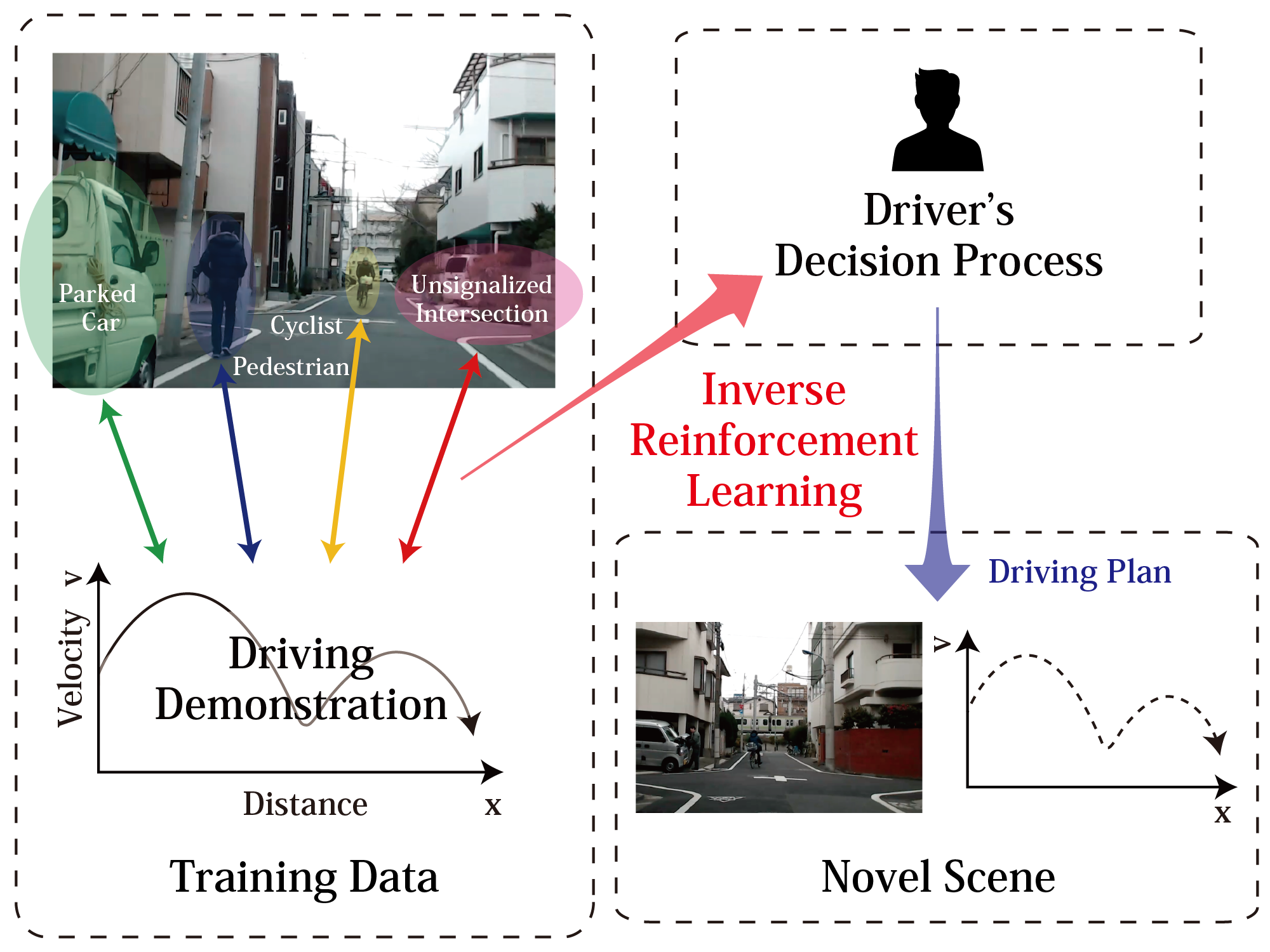
 Driving safety technology has been actively studied, and contributed to reduce the number of traffic accidents, however, the reduction rate of traffic accidents is still low on residential roads or zone 30. On residential roads, the principal causes of traffic accidents are sudden running-out of a pedestrian and insufficient safety confirmation of a driver. Therefore, existing technology, such as the pedestrian detection and collision avoidance system, cannot always prevent the accidents since vehicles require the braking distance. A key to avoid the accidents is the anticipation of potential risk and advanced planning of safety driving. The driving behavior is called “risk anticipation and defensive driving” and our goal is to model it. In order to achieve the goal, the following two points need to ponder: (1) the safety standard of the behavior is not explicitly defined by the traffic rules; (2) various environmental factors, such as pedestrians, cyclists, unsignalized intersections, and parked vehicle, affect the behavior on residential roads. To overcome the points, we propose a novel method for modeling risk anticipation and defensive driving (Shimosaka et al., ITSC 2014). We use inverse reinforcement learning and optimize the model based on the actual driving demonstration. As an application of our proposed method, we construct a system for warning to a driver who is insufficient to consider risk anticipation.
Driving safety technology has been actively studied, and contributed to reduce the number of traffic accidents, however, the reduction rate of traffic accidents is still low on residential roads or zone 30. On residential roads, the principal causes of traffic accidents are sudden running-out of a pedestrian and insufficient safety confirmation of a driver. Therefore, existing technology, such as the pedestrian detection and collision avoidance system, cannot always prevent the accidents since vehicles require the braking distance. A key to avoid the accidents is the anticipation of potential risk and advanced planning of safety driving. The driving behavior is called “risk anticipation and defensive driving” and our goal is to model it. In order to achieve the goal, the following two points need to ponder: (1) the safety standard of the behavior is not explicitly defined by the traffic rules; (2) various environmental factors, such as pedestrians, cyclists, unsignalized intersections, and parked vehicle, affect the behavior on residential roads. To overcome the points, we propose a novel method for modeling risk anticipation and defensive driving (Shimosaka et al., ITSC 2014). We use inverse reinforcement learning and optimize the model based on the actual driving demonstration. As an application of our proposed method, we construct a system for warning to a driver who is insufficient to consider risk anticipation.
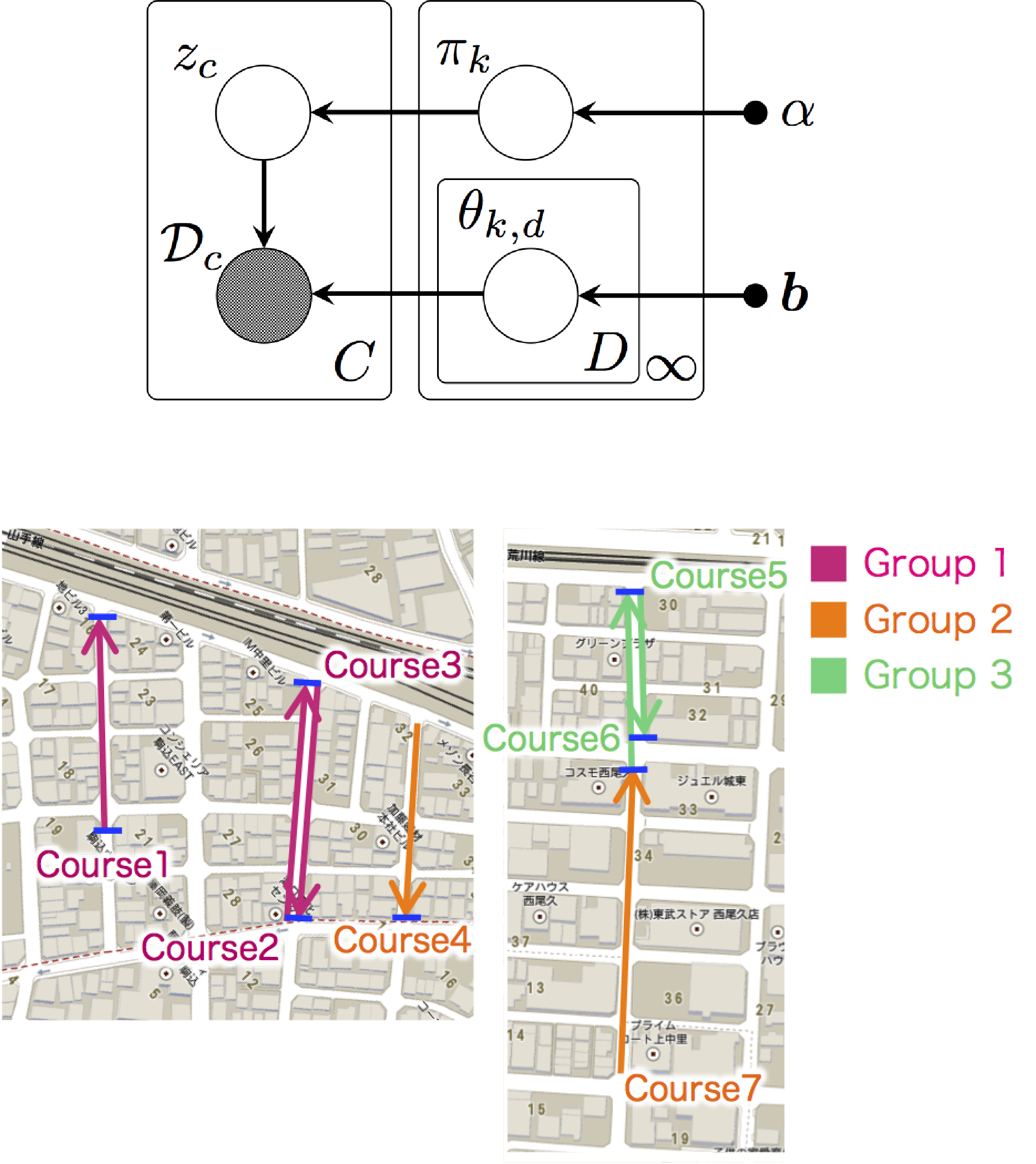
Furthermore, we propose a mixtured IRL framework where multiple reward functions deal with environmental diversity (Shimosaka et al., IV 2015). Specifically, the model employs Dirichlet process mixtures as a flexible and powerful Bayesian model to divide the environment into clusters and learns the parameters in each cluster simultaneously. Experimental result shows that our model provides superior performance over the IRL model with single reward function. It also suggests that the clustering of environments based on the driving behavior of professional drivers could be useful on evaluating driving environments.
Publications
Masamichi Shimosaka, Takuhiro Kaneko, Kentaro Nishi.
Modeling risk anticipation and defensive driving on residential roads with inverse reinforcement learning.
In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC2014), pp.1694-1700, 2014.
Masamichi Shimosaka, Kentaro Nishi, Junichi Sato, Hirokatsu Kataoka.
Predicting driving behavior using inverse reinforcement learning with multiple reward functions towards environmental diversity.
In Proceedings of 2015 IEEE Intelligent Vehicles Symposium (IV 2015), pp. 567–572, 2015.