In this project, we aim to enable early and accurate forecasting of urban dynamics at a city scale, which we refer to as efficient urban dynamics forecasting. To achieve early prediction, we focus on large-scale schedule information generated by users, such as transit route search logs from navigation applications [Konishi et al., UbiComp 2016; Anno et al., SIGSPATIAL 2020].
However, two major challenges arise when using such data for early forecasting. First, although transit search logs reveal which stations people are likely to arrive at, they do not indicate the final destinations after users leave the stations. Second, urban environments around event venues are often complex: multiple venues and stations exist in close proximity, and abnormal crowding events may occur due to complicated inflow patterns from surrounding stations.
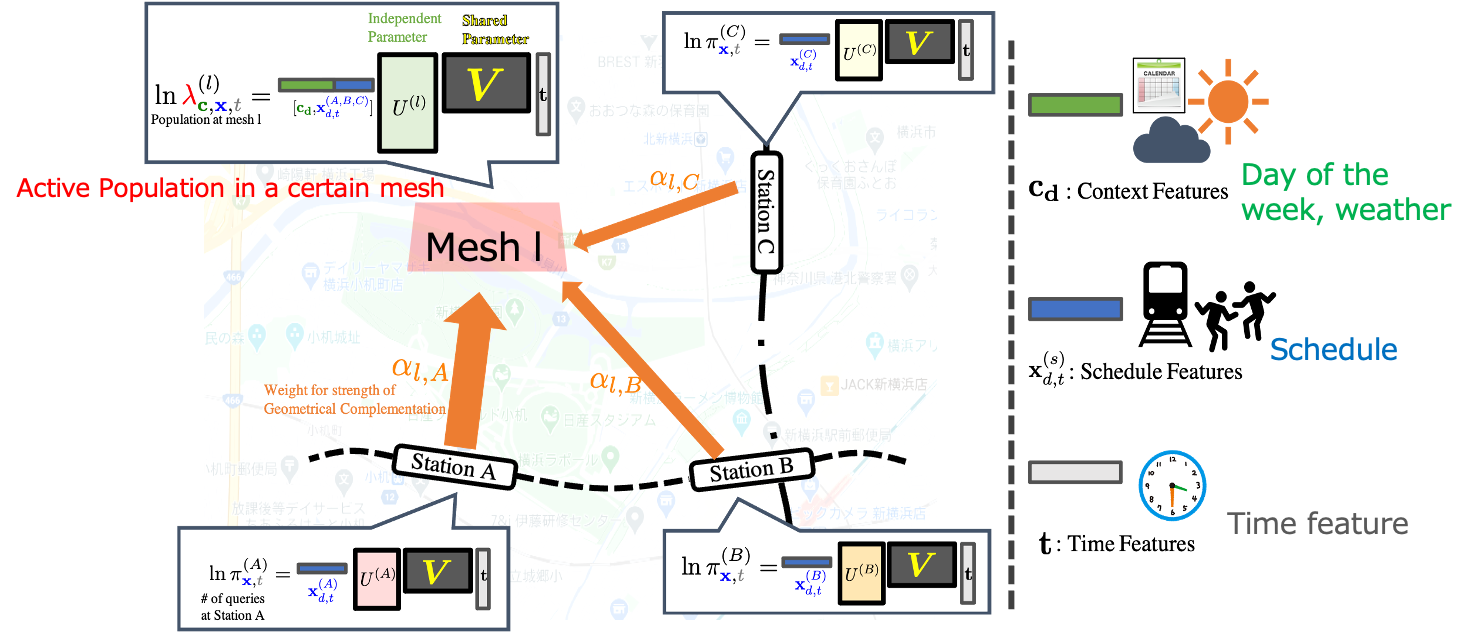
To address these challenges, we proposed Geometrically Complemented Multi-task Poisson Regression (GCPR). The proposed model jointly learns crowd dynamics in a target region together with user flow patterns from surrounding stations. By sharing parameters between these related prediction tasks, the model can compensate for the missing information about final destinations after station arrival.
Furthermore, to capture the spatial structure of urban environments, the degree of parameter sharing is adaptively determined based on both the geographical distance between stations and regions and the correlation of their population dynamics. This design enables the model to incorporate geometric relationships among stations and venues while accounting for differences between regions.
We evaluated the proposed method using GPS-based mobility logs and transit search logs collected for twelve large-scale events held across Japan between 2019 and 2020. The results show that the proposed model can forecast crowding not only around stations but also at venues located away from stations up to one week in advance. Compared with existing approaches, the method achieved up to a 42% reduction in prediction error.
Publications
Soto Anno, Kota Tsubouchi, Masamichi Shimosaka
Early crowd forecasting away from stations by geographically complemented regression using transit search and mobility logs
Journal of Big Data, 7 2025.