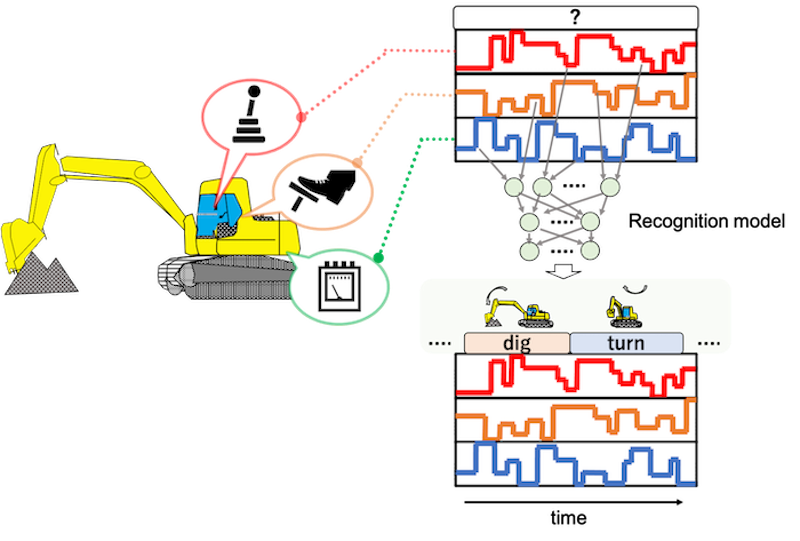
If we can visualize and understand the motions of humans and construction machines based on the surrounding information, we can use this information for various applications such as improving work efficiency.In order to achieve this, it is important to appropriately learn the relationship between the correct action and the information obtained.In this research, we are constructing an action recognition model using time-series data obtained from wearable sensors in order to infer tasks at different times with high performance.
However, when considering the acquisition of actions in a natural setting, there is a problem that the amount of data for each class is highly imbalanced when discriminating into a large number of actions (classes).To address this problem, we proposed a multi-label LSTM that incorporates the framework of multi-label classification, while at the same time being able to deal with long-term contexts.In this work, we present several approaches to integrate the two existing techniques and discuss their superiority and inferiority with experimental results.
Publications
Haruka Abe, Takuya Hino, Motohide Sugihara, Hiroki Ikeya, and Masamichi Shimosaka.
Multi-label long short-term memory for construction vehicle activity recognition with imbalanced supervision.
In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 8990–8996, Las Vegas, NV, USA (Virtual), October 2020.