This paper deals with the sensor arrangement for activity classification of the people living alone with pyroelectric sensors, so that the system acquires as high precision of classification with as small sensor numbers as possible.
We suggest some heuristic algorithms for approximate optimization of sensor combination, and some machine learning algorithms for exact optimization of feature selection which corresponds to that of sensor selection.
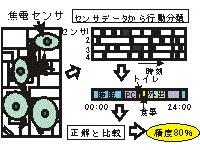
For some examinations, we confirmed the significance of automatic arrangement system by comparing the quasi-optimized sensor arrangement acquired by above algorithms with the arrangement by human judge.